Hi, I'm Zhiye Zhao
(Caesar)
Robotics Engineer
High level experience in Robotics and Artificial Intelligence, producing quality work.
Contact MeAbout Me
My introduction
Personal Interests
I have extensive experience in developing robotic systems, with expertise in path planning, multi-sensor fusion, state estimation, motion control, and vision processing. I’m capable of managing the full development cycle—from algorithm design to simulation and deployment.
Currently, I focus on embodied intelligence, where I explore how reinforcement learning and perception-decision models can enhance the autonomy and adaptability of next-generation humanoid robots.
My goal is to promote the real-world adoption of robotics technology in industrial and service scenarios.
experience
projects
worked
Technical Skill
My technical levelRobotics Engineer
More than 3 yearsROS1
ProficientROS2
ProficientGazebo / Ignition Gazebo
ProficientPyBullet
ProficientDrake
SkilledMujoco
SkilledIsaac Sim
SkilledArtificial Intelligence
More than 3 yearsPyTorch
ProficientMachine Learning
ProficientDeep Learning
ProficientComputer Vision
ProficientReinforcement Learning
SkilledImitation Learning
SkilledSoft Skills
Improved through projects and teamworkSustainable Engineering Thinking
View ReportIntercultural Communication
View ReportAnalytical Problem Solving
ProficientProject Leadership
SkilledTime Management
SkilledQualification
My personal journeyMechanical Design Manufacture and Automation
Hunan Institute of TechnologyMaster of Professional Engineering, Robotics
University of Technology Sydney (UTS)Embodied intelligence
Self-StudyTeaching Assistant & Research Assistant (Part time)
OnlineResearch & Development Engineer (Intern)
Optik ConsultancyPortfolio
Most recent works
ASAP/PBHC Whole-Body Control
A whole-body control stack integrating ASAP and PBHC for robust humanoid motion across manipulation and locomotion tasks.
Demo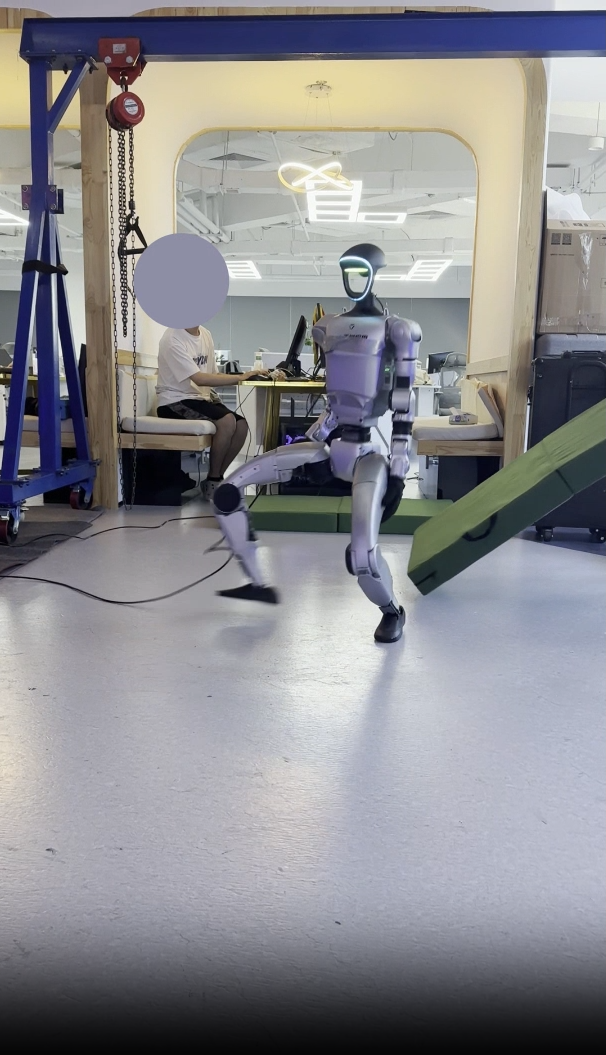
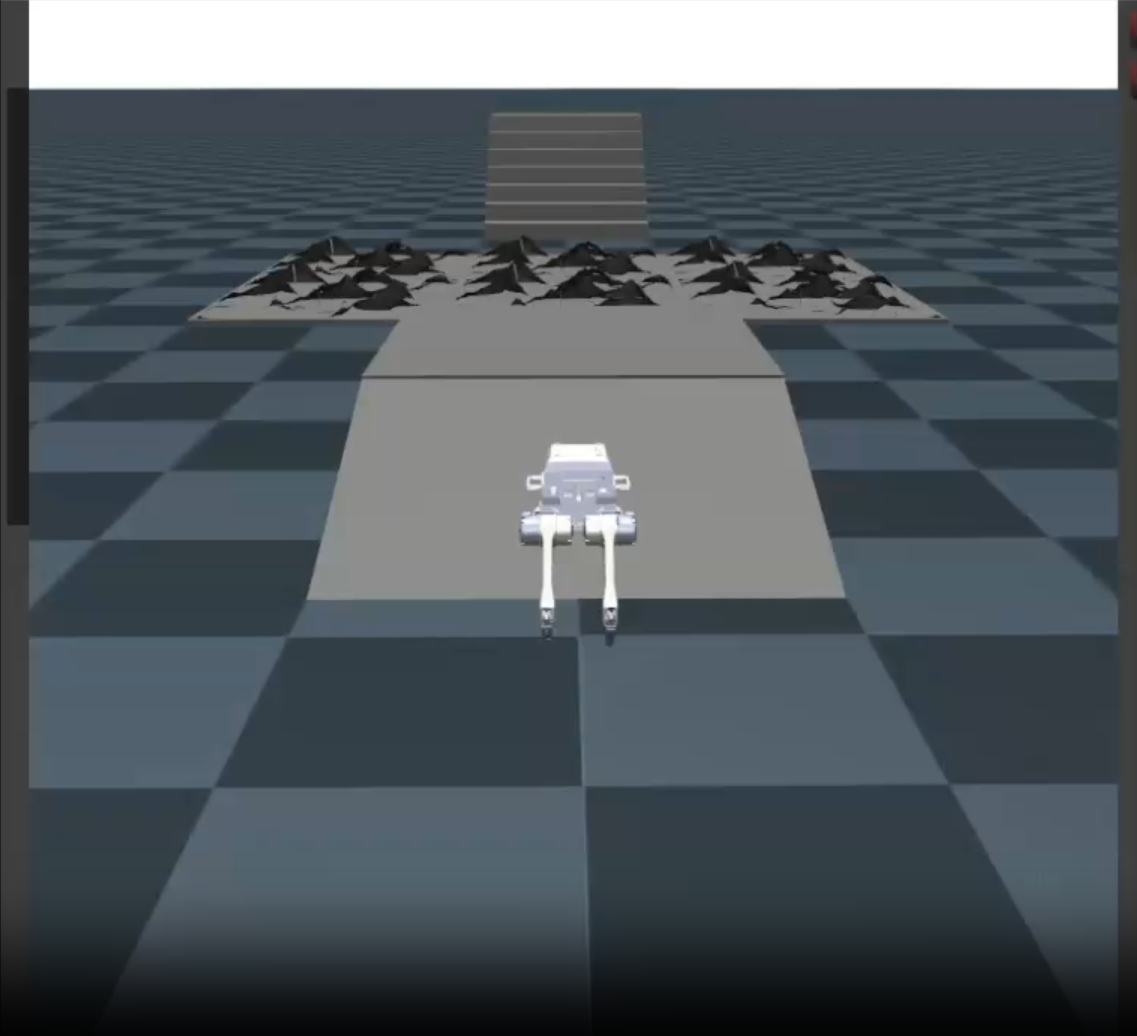
Tron1A Point-Foot Biped Locomotion
Locomotion control and estimation for a point-foot biped platform, focusing on stability and agile gait transitions.
Demo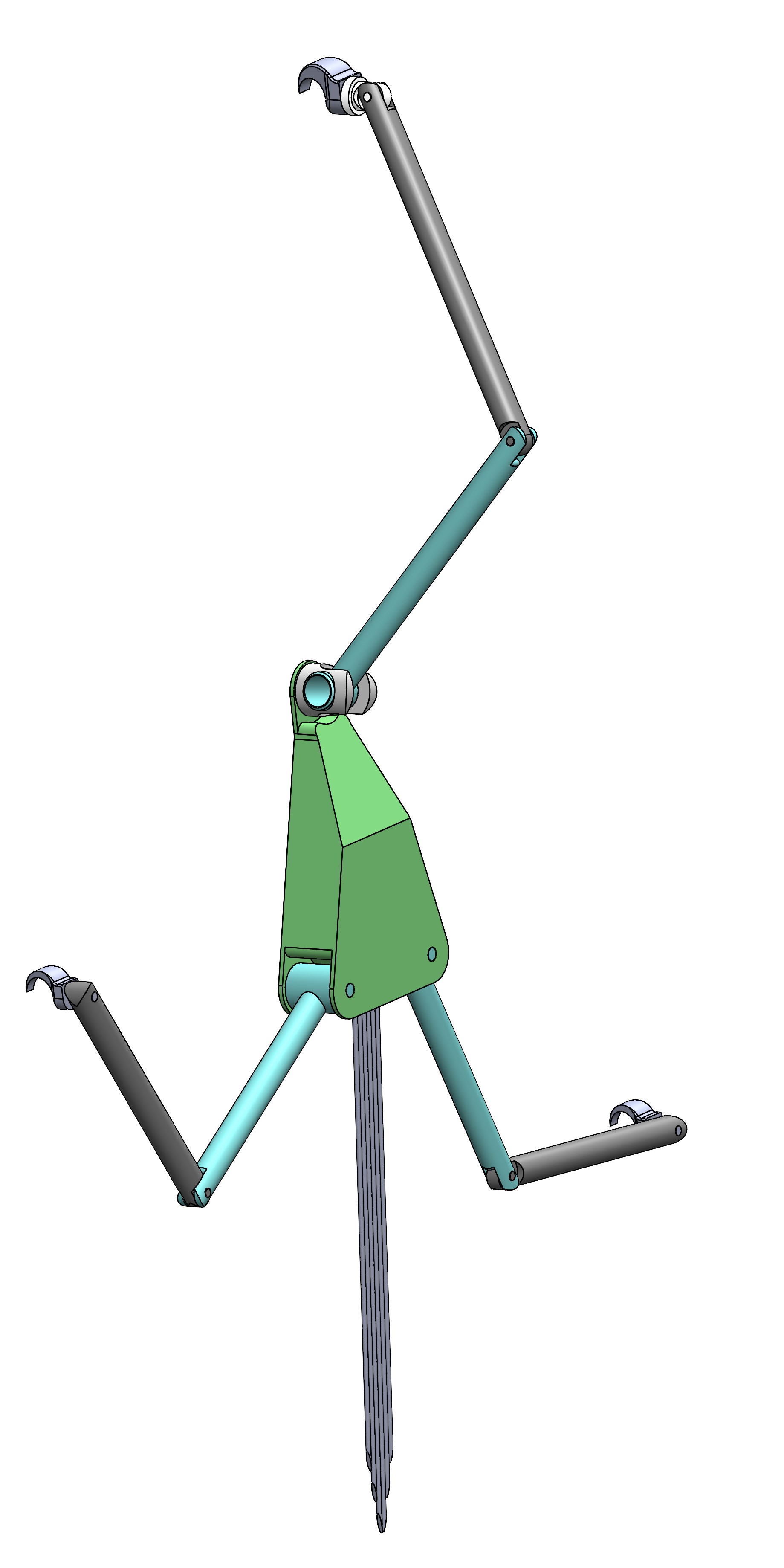
State Estimation for the ParCli Tripedal Climbing Robot
This project focuses on state estimation for the ParCli tripedal climbing robot. Using multi-sensor fusion and Extended Kalman Filter (EKF), it improves localization accuracy and motion stability, enabling reliable climbing and navigation in complex environments.
Demo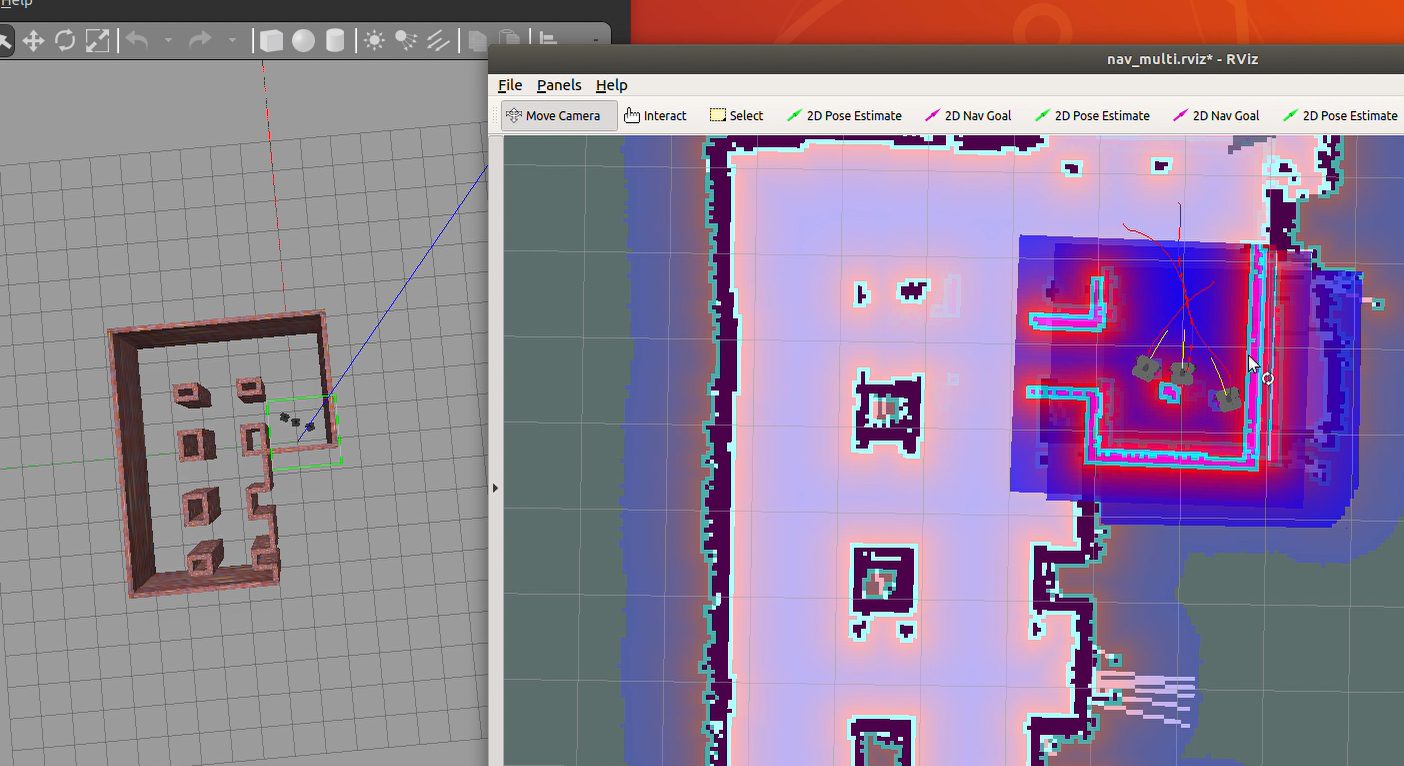
Multi-Robot Navigation System
This project is a multi-robot navigation system on Ubuntu 18.04 that utilizes TurtleBot. By integrating sensor fusion and path planning, it enables collaborative localization and autonomous navigation in shared environments.
Demo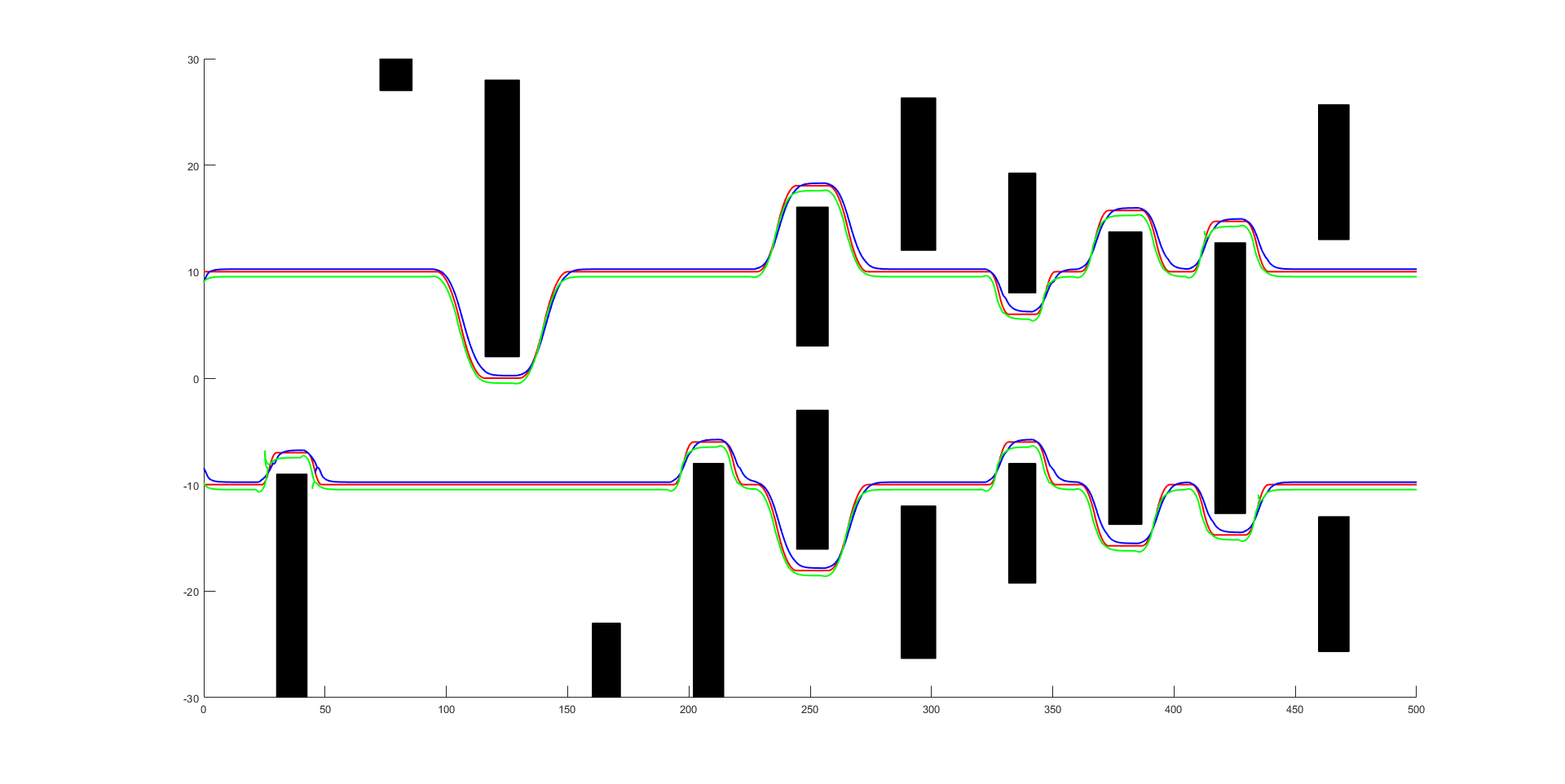
Leader-Follower Formation Control with MPC
This project implements a multi-robot formation control system based on Model Predictive Control (MPC). By employing a leader-follower strategy, it ensures robust and stable group movement under dynamic conditions.
Demo.png)
3D Point Cloud Perception and Surface Modeling
This project integrates semantic classification and regression-based surface reconstruction of 3D point cloud data for robotic perception. It includes clustering, PCA, SVM, and Gaussian Process Regression.
Demo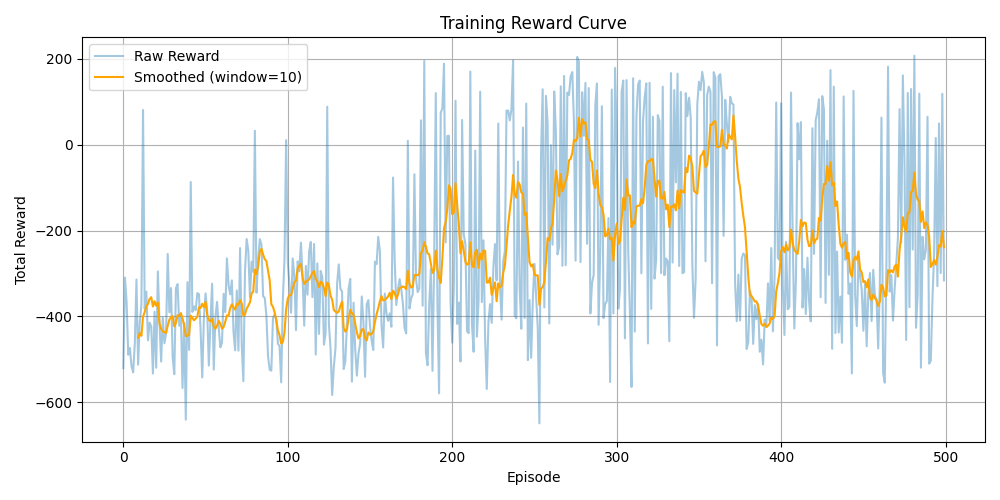
Deep Q-Network Navigation in PyBullet
This project implements a Deep Q-Network (DQN) agent for autonomous driving in a simulated PyBullet environment. The agent learns to navigate towards dynamic goals while avoiding obstacles, with support for training, evaluation, and animated diagnostics. Built on top of the simple-car-env-template and extended independently.
Demo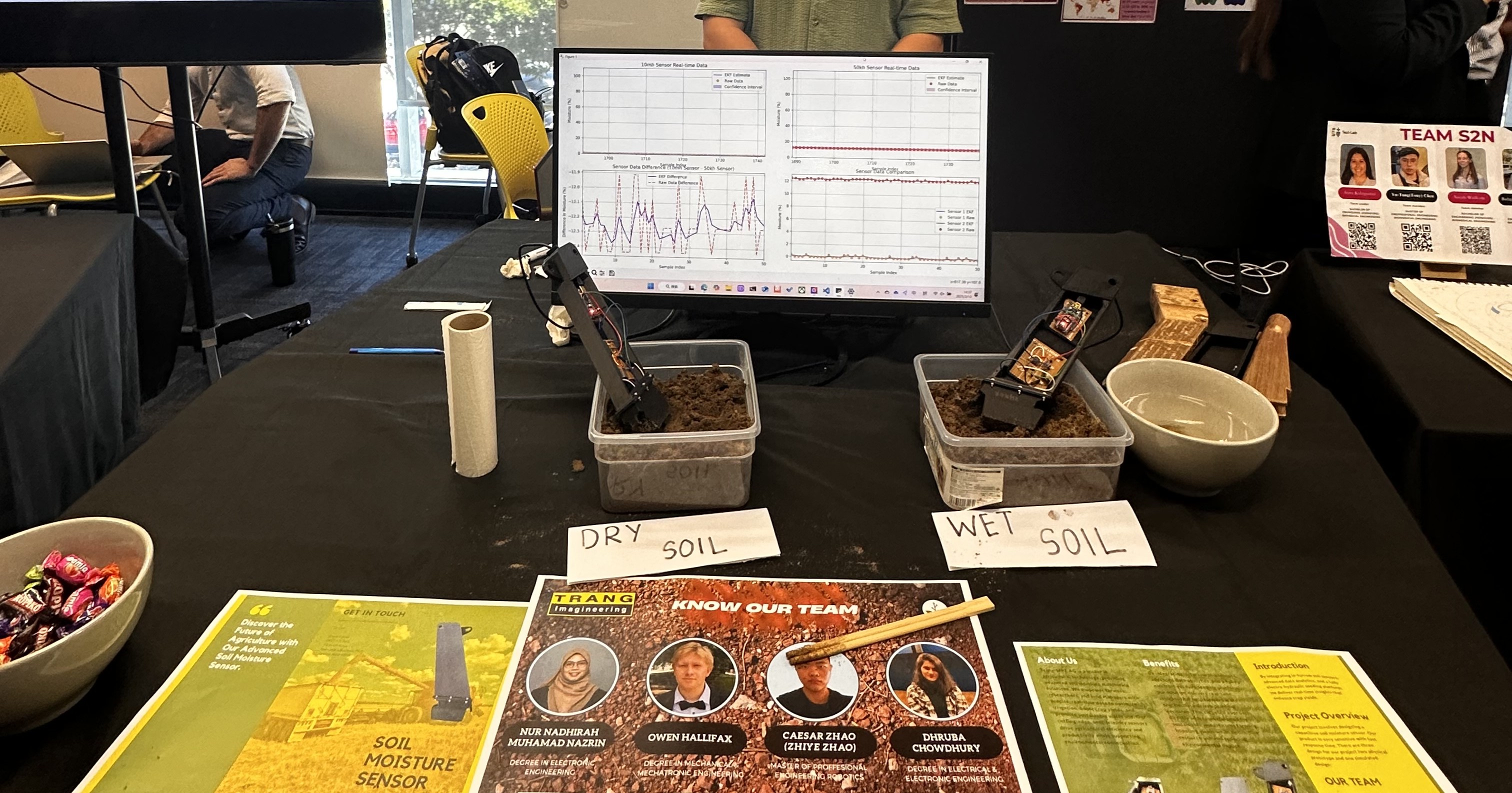
Soil Moisture Estimation via EKF-Based Multi-Sensor Fusion
This project presents a soil moisture sensing system enhanced by Extended Kalman Filter (EKF)-based data fusion. By combining multiple ADC-based sensor readings, the system reduces noise and improves estimation stability, enabling accurate and real-time soil moisture monitoring for agricultural automation.
Demo