3D Point Cloud Perception and Surface Modeling
Overview
This project independently develops a comprehensive pipeline for semantic classification and terrain reconstruction of 3D point cloud data. It integrates unsupervised clustering (K-Means), dimensionality reduction (PCA), supervised learning (SVM), and regression modeling (Linear Regression and Gaussian Process Regression) with uncertainty estimation. This solution enables accurate environmental perception essential for robotics, autonomous navigation, and intelligent mapping applications.
Demonstration
The following visualizations illustrate each critical stage of the implemented pipeline, from initial segmentation and feature extraction to high-accuracy classification and reliable surface modeling.
Point Cloud Classification
This stage focuses on robust semantic classification through a combination of unsupervised clustering, dimensionality reduction, and supervised machine learning methods.
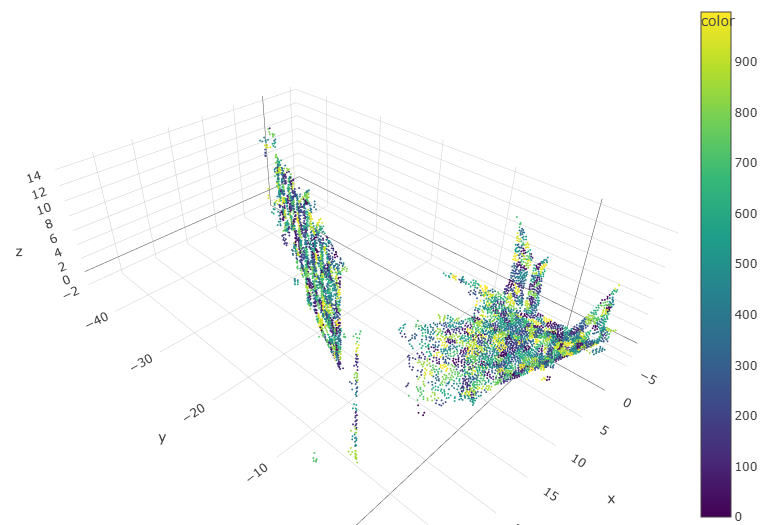
K-Means clustering effectively segments the raw 3D data based on spatial coordinates and RGB color values, enabling accurate region separation without prior labeling.
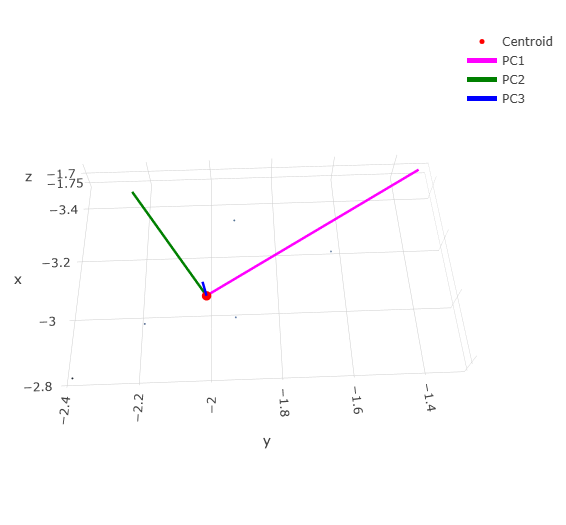
Principal Component Analysis (PCA) identifies dominant geometric directions within clusters, significantly enhancing the clarity and efficiency of subsequent feature extraction.
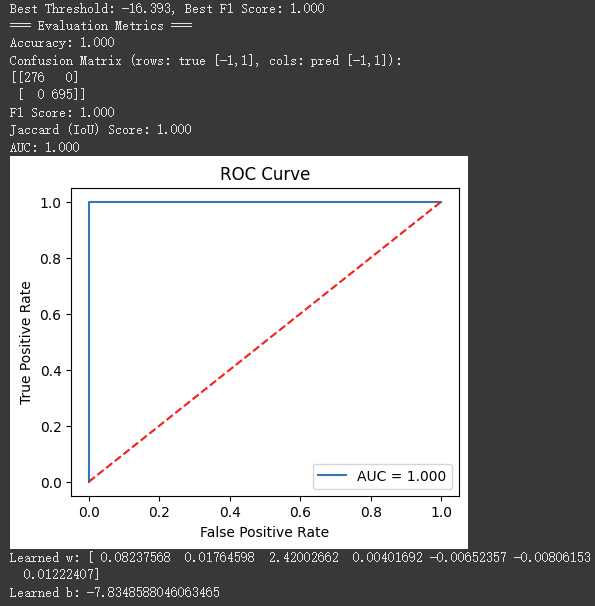
An optimized Support Vector Machine (SVM) classifier achieves exceptional accuracy, demonstrating perfect (AUC = 1.0) classification performance on the training dataset.
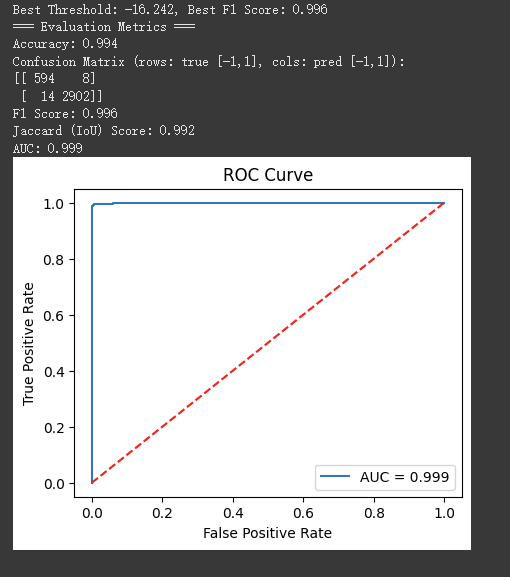
The classifier maintains outstanding generalization performance with an AUC of 0.999 on unseen test data, confirming robustness and reliability.
Surface Modeling
Here, continuous surface reconstruction and uncertainty quantification are performed to ensure precise and reliable terrain modeling.
.png)
Gaussian Process Regression (GPR) provides smooth and accurate terrain predictions, accompanied by uncertainty estimates (confidence intervals), essential for decision-making under uncertainty.
.png)
Analysis reveals a strong correlation between predicted uncertainties and actual errors, validating the effectiveness and reliability of the GPR model calibration.
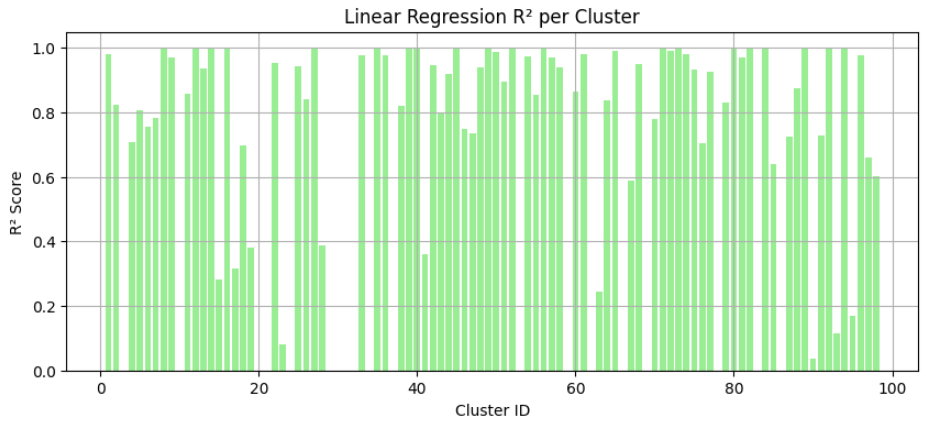
Linear regression shows high R² scores particularly in structurally simpler regions (walls and floors), highlighting the model's suitability for planar surface reconstruction.
Methods
- ✓ Unsupervised spatial-color segmentation using K-Means clustering.
- ✓ Dimensionality reduction via PCA for effective feature extraction.
- ✓ Robust supervised classification using SVM with extensive evaluation metrics (ROC-AUC, F1, Confusion Matrix).
- ✓ Surface reconstruction with segmented Linear Regression models.
- ✓ Probabilistic terrain modeling via Gaussian Process Regression including uncertainty quantification.
- ✓ Hyperparameter optimization of GPR models using Maximum Likelihood Estimation (MLE).